November 2018 – June 2019
Department of Electrical and Electronic Engineering
Imperial College
London, United Kingdom
MEng Dissertation
From November 2018 to June 2019, I conducted my dissertation project under the supervision of Dr Eric Kerrigan at Imperial College, London.
Having previously investigated decentralized multi-agent cooperative payload transportation at KAUST, I explored a model predictive control approach to optimize agent trajectories under environmental constraints. After formulating a novel decreasing horizon optimal control problem, I performed a staged implementation of the system using the ICLOCS2 trajectory optimization package with MATLAB for open-loop simulations. I then graphically derived Simscape models for closed-loop Simulink simulations to visualize the system's physical behavior.
At the conclusion of the project I submitted my issertation and presented the main findings to my home department. The project code is open-sourced with the repository hosted at GitHub.
Problem Setup
Here we represent three agents with a colored dot and a triplet of coordinates (x,y,z) with respect to a world reference frame. The payload is split into three identical point masses corresponding to the respective agents.

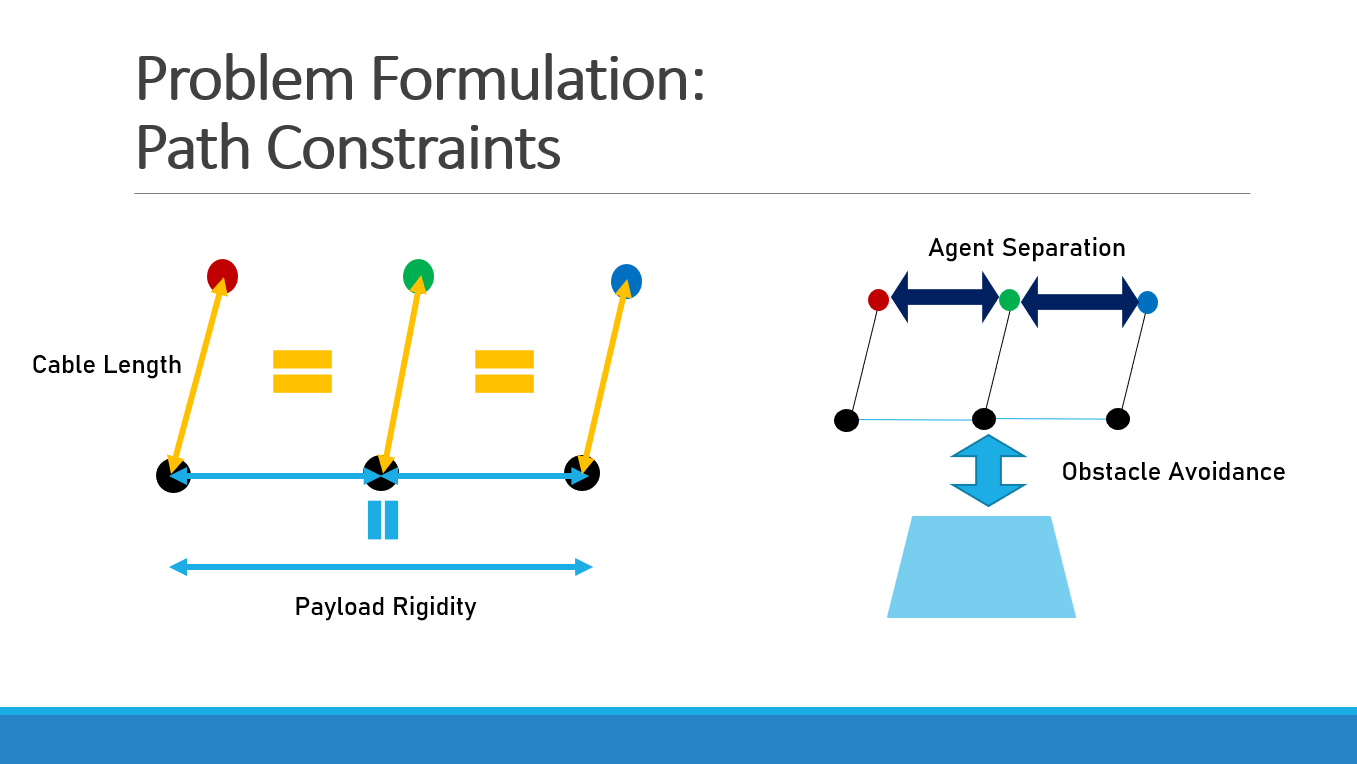
Constraints
The system of agents and the payload masses must satisfy certain physical constraints (e.g. inelastic suspension cables, no payload distortion). It's also ideal if the system exhibits other behaviors (e.g. agent separation, obstacle avoidance).
Optimal Control Problem
For the triple-agent system we formulate a decreasing horizon problem in which we seek to minimize a convex objective function (the sum of the squared separation from the target position and squared actuator forces). We impose three sets constraints corresponding to the agent-payload cable lengths, inter-agent separation, and a spatial obstacle. In our formulation we also include a slack variable (indicated by red arrows).

Single Agent Relocation
As a precursor to triple-agent cooperative payload transportation, we consider the single agent relocation problem.
Triple-Agent CPT
The final simulation of a triple-agent CPT system uses SimScape with Simulink in closed-loop.